Robótica
Clase 07
Semana 8 - 05/05/2025
Posicionamiento 2D

Posicionamiento 2D

Posicionamiento 2D

Posicionamiento 2D

Posicionamiento 2D

Posicionamiento 2D

Posicionamiento 2D

Posicionamiento 2D

Posicionamiento 2D

Posicionamiento 2D

Posicionamiento 2D

Notación
Punto: \(\require{color} \textcolor{PineGreen}{d}_{2D} = \begin{pmatrix} \textcolor{Orange}{a} \\ \textcolor{RedViolet}{b} \end{pmatrix} \;\)
Vector: \[\require{color} {}^{\textcolor{Blue}{A}}{\boldsymbol{\textcolor{LimeGreen}{p}}_\textcolor{PineGreen}{d}} = \textcolor{Orange}{a} \boldsymbol{\vec{i}} + \textcolor{RedViolet}{b} \boldsymbol{\vec{j}}\]


Rotación 2D
Dado un marco de referencia \(\textcolor{Orange}{\{B\}}\) rotado un ángulo \(\textcolor{Plum}{\theta}\) respecto de un marco de referencia \(\textcolor{Blue}{\{A\}}\). Encontrar la matriz de transformación que convierte las coordenadas del marco \(\textcolor{Orange}{B}\) al \(\textcolor{Blue}{A}\).
Rotación 2D
\[ {}^{\textcolor{Orange}{\boldsymbol{B}}}{\textcolor{ForestGreen}{\boldsymbol{p}}} = \begin{pmatrix} \textcolor{Orange}{p_{{x}_\boldsymbol{B}}} \\ \textcolor{Orange}{p_{{y}_\boldsymbol{B}}} \end{pmatrix} = \begin{pmatrix} \colorbox{white}{$ |\textcolor{ForestGreen}{\boldsymbol{p}}| \cos{\textcolor{Maroon}{\alpha}} $} \\ \colorbox{white}{$ |\textcolor{ForestGreen}{\boldsymbol{p}}| \sin{\textcolor{Maroon}{\alpha}} $} \end{pmatrix} \]
\[ {}^{\textcolor{Blue}{\boldsymbol{A}}}{\textcolor{ForestGreen}{\boldsymbol{p}}} = \begin{pmatrix} \textcolor{Blue}{p_{{x}_\boldsymbol{A}}} \\ \textcolor{Blue}{p_{{y}_\boldsymbol{A}}} \end{pmatrix} = \begin{pmatrix} |\textcolor{ForestGreen}{\boldsymbol{p}}| \cos{(\textcolor{Maroon}{\alpha}+\textcolor{Plum}{\theta})} \\ |\textcolor{ForestGreen}{\boldsymbol{p}}| \sin{(\textcolor{Maroon}{\alpha}+\textcolor{Plum}{\theta})} \end{pmatrix} \]
Sabiendo:
- \(\sin{(A+B)} = \sin{A} \cos{B} + \cos{A} \sin{B}\)
- \(\cos{(A+B)} = \cos{A} \cos{B} - \sin{A} \sin{B}\)
\[ \begin{align} \begin{pmatrix} \textcolor{Blue}{p_{{x}_\boldsymbol{A}}} \\ \textcolor{Blue}{p_{{y}_\boldsymbol{A}}} \end{pmatrix} &= \begin{pmatrix} |\textcolor{ForestGreen}{\boldsymbol{p}}| ( \cos{\textcolor{Maroon}{\alpha}} \cos{\textcolor{Plum}{\theta}} - \sin{\textcolor{Maroon}{\alpha}} \sin{\textcolor{Plum}{\theta}} ) \\ |\textcolor{ForestGreen}{\boldsymbol{p}}| ( \sin{\textcolor{Maroon}{\alpha}} \cos{\textcolor{Plum}{\theta}} + \cos{\textcolor{Maroon}{\alpha}} \sin{\textcolor{Plum}{\theta}} ) \end{pmatrix} \\ &= \begin{pmatrix} \colorbox{white}{$ |\textcolor{ForestGreen}{\boldsymbol{p}}| \cos{\textcolor{Maroon}{\alpha}} $} \cos{\textcolor{Plum}{\theta}} - \colorbox{white}{$ |\textcolor{ForestGreen}{\boldsymbol{p}}| \sin{\textcolor{Maroon}{\alpha}} $} \sin{\textcolor{Plum}{\theta}} \\ \colorbox{white}{$ |\textcolor{ForestGreen}{\boldsymbol{p}}| \sin{\textcolor{Maroon}{\alpha}} $} \cos{\textcolor{Plum}{\theta}} + \colorbox{white}{$ |\textcolor{ForestGreen}{\boldsymbol{p}}| \cos{\textcolor{Maroon}{\alpha}} $} \sin{\textcolor{Plum}{\theta}} \end{pmatrix} \end{align} \]

Rotación 2D
\[ {}^{\textcolor{Orange}{\boldsymbol{B}}}{\textcolor{ForestGreen}{\boldsymbol{p}}} = \begin{pmatrix} \textcolor{Orange}{p_{{x}_\boldsymbol{B}}} \\ \textcolor{Orange}{p_{{y}_\boldsymbol{B}}} \end{pmatrix} = \begin{pmatrix} \colorbox{Gray}{$ |\textcolor{ForestGreen}{\boldsymbol{p}}| \cos{\textcolor{Maroon}{\alpha}} $} \\ \colorbox{white}{$ |\textcolor{ForestGreen}{\boldsymbol{p}}| \sin{\textcolor{Maroon}{\alpha}} $} \end{pmatrix} \]
\[ {}^{\textcolor{Blue}{\boldsymbol{A}}}{\textcolor{ForestGreen}{\boldsymbol{p}}} = \begin{pmatrix} \textcolor{Blue}{p_{{x}_\boldsymbol{A}}} \\ \textcolor{Blue}{p_{{y}_\boldsymbol{A}}} \end{pmatrix} = \begin{pmatrix} |\textcolor{ForestGreen}{\boldsymbol{p}}| \cos{(\textcolor{Maroon}{\alpha}+\textcolor{Plum}{\theta})} \\ |\textcolor{ForestGreen}{\boldsymbol{p}}| \sin{(\textcolor{Maroon}{\alpha}+\textcolor{Plum}{\theta})} \end{pmatrix} \]
Sabiendo:
- \(\sin{(A+B)} = \sin{A} \cos{B} + \cos{A} \sin{B}\)
- \(\cos{(A+B)} = \cos{A} \cos{B} - \sin{A} \sin{B}\)
\[ \begin{align} \begin{pmatrix} \textcolor{Blue}{p_{{x}_\boldsymbol{A}}} \\ \textcolor{Blue}{p_{{y}_\boldsymbol{A}}} \end{pmatrix} &= \begin{pmatrix} |\textcolor{ForestGreen}{\boldsymbol{p}}| ( \cos{\textcolor{Maroon}{\alpha}} \cos{\textcolor{Plum}{\theta}} - \sin{\textcolor{Maroon}{\alpha}} \sin{\textcolor{Plum}{\theta}} ) \\ |\textcolor{ForestGreen}{\boldsymbol{p}}| ( \sin{\textcolor{Maroon}{\alpha}} \cos{\textcolor{Plum}{\theta}} + \cos{\textcolor{Maroon}{\alpha}} \sin{\textcolor{Plum}{\theta}} ) \end{pmatrix} \\ &= \begin{pmatrix} \colorbox{Gray}{$ |\textcolor{ForestGreen}{\boldsymbol{p}}| \cos{\textcolor{Maroon}{\alpha}} $} \cos{\textcolor{Plum}{\theta}} - \colorbox{white}{$ |\textcolor{ForestGreen}{\boldsymbol{p}}| \sin{\textcolor{Maroon}{\alpha}} $} \sin{\textcolor{Plum}{\theta}} \\ \colorbox{white}{$ |\textcolor{ForestGreen}{\boldsymbol{p}}| \sin{\textcolor{Maroon}{\alpha}} $} \cos{\textcolor{Plum}{\theta}} + \colorbox{Gray}{$ |\textcolor{ForestGreen}{\boldsymbol{p}}| \cos{\textcolor{Maroon}{\alpha}} $} \sin{\textcolor{Plum}{\theta}} \end{pmatrix} \end{align} \]
Rotación 2D
\[ {}^{\textcolor{Orange}{\boldsymbol{B}}}{\textcolor{ForestGreen}{\boldsymbol{p}}} = \begin{pmatrix} \textcolor{Orange}{p_{{x}_\boldsymbol{B}}} \\ \textcolor{Orange}{p_{{y}_\boldsymbol{B}}} \end{pmatrix} = \begin{pmatrix} \colorbox{Gray}{$ |\textcolor{ForestGreen}{\boldsymbol{p}}| \cos{\textcolor{Maroon}{\alpha}} $} \\ \colorbox{lightgray}{$ |\textcolor{ForestGreen}{\boldsymbol{p}}| \sin{\textcolor{Maroon}{\alpha}} $} \end{pmatrix} \]
\[ {}^{\textcolor{Blue}{\boldsymbol{A}}}{\textcolor{ForestGreen}{\boldsymbol{p}}} = \begin{pmatrix} \textcolor{Blue}{p_{{x}_\boldsymbol{A}}} \\ \textcolor{Blue}{p_{{y}_\boldsymbol{A}}} \end{pmatrix} = \begin{pmatrix} |\textcolor{ForestGreen}{\boldsymbol{p}}| \cos{(\textcolor{Maroon}{\alpha}+\textcolor{Plum}{\theta})} \\ |\textcolor{ForestGreen}{\boldsymbol{p}}| \sin{(\textcolor{Maroon}{\alpha}+\textcolor{Plum}{\theta})} \end{pmatrix} \]
Sabiendo:
- \(\sin{(A+B)} = \sin{A} \cos{B} + \cos{A} \sin{B}\)
- \(\cos{(A+B)} = \cos{A} \cos{B} - \sin{A} \sin{B}\)
\[ \begin{align} \begin{pmatrix} \textcolor{Blue}{p_{{x}_\boldsymbol{A}}} \\ \textcolor{Blue}{p_{{y}_\boldsymbol{A}}} \end{pmatrix} &= \begin{pmatrix} |\textcolor{ForestGreen}{\boldsymbol{p}}| ( \cos{\textcolor{Maroon}{\alpha}} \cos{\textcolor{Plum}{\theta}} - \sin{\textcolor{Maroon}{\alpha}} \sin{\textcolor{Plum}{\theta}} ) \\ |\textcolor{ForestGreen}{\boldsymbol{p}}| ( \sin{\textcolor{Maroon}{\alpha}} \cos{\textcolor{Plum}{\theta}} + \cos{\textcolor{Maroon}{\alpha}} \sin{\textcolor{Plum}{\theta}} ) \end{pmatrix} \\ &= \begin{pmatrix} \colorbox{Gray}{$ |\textcolor{ForestGreen}{\boldsymbol{p}}| \cos{\textcolor{Maroon}{\alpha}} $} \cos{\textcolor{Plum}{\theta}} - \colorbox{lightgray}{$ |\textcolor{ForestGreen}{\boldsymbol{p}}| \sin{\textcolor{Maroon}{\alpha}} $} \sin{\textcolor{Plum}{\theta}} \\ \colorbox{lightgray}{$ |\textcolor{ForestGreen}{\boldsymbol{p}}| \sin{\textcolor{Maroon}{\alpha}} $} \cos{\textcolor{Plum}{\theta}} + \colorbox{Gray}{$ |\textcolor{ForestGreen}{\boldsymbol{p}}| \cos{\textcolor{Maroon}{\alpha}} $} \sin{\textcolor{Plum}{\theta}} \end{pmatrix} \end{align} \]
Rotación 2D
\[ {}^{\textcolor{Orange}{\boldsymbol{B}}}{\textcolor{ForestGreen}{\boldsymbol{p}}} = \begin{pmatrix} \textcolor{Orange}{p_{{x}_\boldsymbol{B}}} \\ \textcolor{Orange}{p_{{y}_\boldsymbol{B}}} \end{pmatrix} = \begin{pmatrix} \colorbox{white}{$ |\textcolor{ForestGreen}{\boldsymbol{p}}| \cos{\textcolor{Maroon}{\alpha}} $} \\ \colorbox{white}{$ |\textcolor{ForestGreen}{\boldsymbol{p}}| \sin{\textcolor{Maroon}{\alpha}} $} \end{pmatrix} \]
\[ {}^{\textcolor{Blue}{\boldsymbol{A}}}{\textcolor{ForestGreen}{\boldsymbol{p}}} = \begin{pmatrix} \textcolor{Blue}{p_{{x}_\boldsymbol{A}}} \\ \textcolor{Blue}{p_{{y}_\boldsymbol{A}}} \end{pmatrix} = \begin{pmatrix} |\textcolor{ForestGreen}{\boldsymbol{p}}| \cos{(\textcolor{Maroon}{\alpha}+\textcolor{Plum}{\theta})} \\ |\textcolor{ForestGreen}{\boldsymbol{p}}| \sin{(\textcolor{Maroon}{\alpha}+\textcolor{Plum}{\theta})} \end{pmatrix} \]
Sabiendo:
- \(\sin{(A+B)} = \sin{A} \cos{B} + \cos{A} \sin{B}\)
- \(\cos{(A+B)} = \cos{A} \cos{B} - \sin{A} \sin{B}\)
\[ \begin{align} \begin{pmatrix} \textcolor{Blue}{p_{{x}_\boldsymbol{A}}} \\ \textcolor{Blue}{p_{{y}_\boldsymbol{A}}} \end{pmatrix} &= \begin{pmatrix} |\textcolor{ForestGreen}{\boldsymbol{p}}| ( \cos{\textcolor{Maroon}{\alpha}} \cos{\textcolor{Plum}{\theta}} - \sin{\textcolor{Maroon}{\alpha}} \sin{\textcolor{Plum}{\theta}} ) \\ |\textcolor{ForestGreen}{\boldsymbol{p}}| ( \sin{\textcolor{Maroon}{\alpha}} \cos{\textcolor{Plum}{\theta}} + \cos{\textcolor{Maroon}{\alpha}} \sin{\textcolor{Plum}{\theta}} ) \end{pmatrix} \\ &= \begin{pmatrix} \colorbox{white}{$ |\textcolor{ForestGreen}{\boldsymbol{p}}| \cos{\textcolor{Maroon}{\alpha}} $} \cos{\textcolor{Plum}{\theta}} - \colorbox{white}{$ |\textcolor{ForestGreen}{\boldsymbol{p}}| \sin{\textcolor{Maroon}{\alpha}} $} \sin{\textcolor{Plum}{\theta}} \\ \colorbox{white}{$ |\textcolor{ForestGreen}{\boldsymbol{p}}| \sin{\textcolor{Maroon}{\alpha}} $} \cos{\textcolor{Plum}{\theta}} + \colorbox{white}{$ |\textcolor{ForestGreen}{\boldsymbol{p}}| \cos{\textcolor{Maroon}{\alpha}} $} \sin{\textcolor{Plum}{\theta}} \end{pmatrix} \\ &= \begin{pmatrix} \textcolor{Orange}{p_{{x}_\boldsymbol{B}}} \cos{\textcolor{Plum}{\theta}} - \textcolor{Orange}{p_{{y}_\boldsymbol{B}}} \sin{\textcolor{Plum}{\theta}} \\ \textcolor{Orange}{p_{{y}_\boldsymbol{B}}} \cos{\textcolor{Plum}{\theta}} + \textcolor{Orange}{p_{{x}_\boldsymbol{B}}} \sin{\textcolor{Plum}{\theta}} \end{pmatrix} \end{align} \]
Rotación 2D
\[ {}^{\textcolor{Orange}{\boldsymbol{B}}}{\textcolor{ForestGreen}{\boldsymbol{p}}} = \begin{pmatrix} \textcolor{Orange}{p_{{x}_\boldsymbol{B}}} \\ \textcolor{Orange}{p_{{y}_\boldsymbol{B}}} \end{pmatrix} = \begin{pmatrix} \colorbox{white}{$ |\textcolor{ForestGreen}{\boldsymbol{p}}| \cos{\textcolor{Maroon}{\alpha}} $} \\ \colorbox{white}{$ |\textcolor{ForestGreen}{\boldsymbol{p}}| \sin{\textcolor{Maroon}{\alpha}} $} \end{pmatrix} \]
\[ {}^{\textcolor{Blue}{\boldsymbol{A}}}{\textcolor{ForestGreen}{\boldsymbol{p}}} = \begin{pmatrix} \textcolor{Blue}{p_{{x}_\boldsymbol{A}}} \\ \textcolor{Blue}{p_{{y}_\boldsymbol{A}}} \end{pmatrix} = \begin{pmatrix} |\textcolor{ForestGreen}{\boldsymbol{p}}| \cos{(\textcolor{Maroon}{\alpha}+\textcolor{Plum}{\theta})} \\ |\textcolor{ForestGreen}{\boldsymbol{p}}| \sin{(\textcolor{Maroon}{\alpha}+\textcolor{Plum}{\theta})} \end{pmatrix} \]
Sabiendo:
- \(\sin{(A+B)} = \sin{A} \cos{B} + \cos{A} \sin{B}\)
- \(\cos{(A+B)} = \cos{A} \cos{B} - \sin{A} \sin{B}\)
\[ \begin{align} \begin{pmatrix} \textcolor{Blue}{p_{{x}_\boldsymbol{A}}} \\ \textcolor{Blue}{p_{{y}_\boldsymbol{A}}} \end{pmatrix} &= \begin{pmatrix} |\textcolor{ForestGreen}{\boldsymbol{p}}| ( \cos{\textcolor{Maroon}{\alpha}} \cos{\textcolor{Plum}{\theta}} - \sin{\textcolor{Maroon}{\alpha}} \sin{\textcolor{Plum}{\theta}} ) \\ |\textcolor{ForestGreen}{\boldsymbol{p}}| ( \sin{\textcolor{Maroon}{\alpha}} \cos{\textcolor{Plum}{\theta}} + \cos{\textcolor{Maroon}{\alpha}} \sin{\textcolor{Plum}{\theta}} ) \end{pmatrix} \\ &= \begin{pmatrix} \colorbox{white}{$ |\textcolor{ForestGreen}{\boldsymbol{p}}| \cos{\textcolor{Maroon}{\alpha}} $} \cos{\textcolor{Plum}{\theta}} - \colorbox{white}{$ |\textcolor{ForestGreen}{\boldsymbol{p}}| \sin{\textcolor{Maroon}{\alpha}} $} \sin{\textcolor{Plum}{\theta}} \\ \colorbox{white}{$ |\textcolor{ForestGreen}{\boldsymbol{p}}| \sin{\textcolor{Maroon}{\alpha}} $} \cos{\textcolor{Plum}{\theta}} + \colorbox{white}{$ |\textcolor{ForestGreen}{\boldsymbol{p}}| \cos{\textcolor{Maroon}{\alpha}} $} \sin{\textcolor{Plum}{\theta}} \end{pmatrix} \\ &= \begin{pmatrix} \textcolor{Orange}{p_{{x}_\boldsymbol{B}}} \cos{\textcolor{Plum}{\theta}} - \textcolor{Orange}{p_{{y}_\boldsymbol{B}}} \sin{\textcolor{Plum}{\theta}} \\ \textcolor{Orange}{p_{{y}_\boldsymbol{B}}} \cos{\textcolor{Plum}{\theta}} + \textcolor{Orange}{p_{{x}_\boldsymbol{B}}} \sin{\textcolor{Plum}{\theta}} \end{pmatrix} = \begin{bmatrix} \cos{\textcolor{Plum}{\theta}} & -\sin{\textcolor{Plum}{\theta}} \\ \sin{\textcolor{Plum}{\theta}} & \cos{\textcolor{Plum}{\theta}}\end{bmatrix} \begin{pmatrix} \textcolor{Orange}{p_{{x}_\boldsymbol{B}}} \\ \textcolor{Orange}{p_{{y}_\boldsymbol{B}}} \end{pmatrix} \end{align} \]
Rotación 2D
Expresado en forma matricial:
\[ \begin{bmatrix} \textcolor{Blue}{p_{{x}_\boldsymbol{A}}} \\ \textcolor{Blue}{p_{{y}_\boldsymbol{A}}} \end{bmatrix} = \begin{bmatrix} \cos{\textcolor{Plum}{\theta}} & -\sin{\textcolor{Plum}{\theta}} \\ \sin{\textcolor{Plum}{\theta}} & \cos{\textcolor{Plum}{\theta}}\end{bmatrix} \begin{bmatrix} \textcolor{Orange}{p_{{x}_\boldsymbol{B}}} \\ \textcolor{Orange}{p_{{y}_\boldsymbol{B}}} \end{bmatrix} \]
\[ {}^\textcolor{Blue}{\boldsymbol{A}}{\textcolor{ForestGreen}{\boldsymbol{p}}} = \boldsymbol{R}(\textcolor{Plum}{\theta}) {}^{\textcolor{Orange}{\boldsymbol{B}}}{\textcolor{ForestGreen}{\boldsymbol{p}}} \to {}^\textcolor{Blue}{\boldsymbol{A}}{\textcolor{ForestGreen}{\boldsymbol{p}}} = {}^\textcolor{Blue}{\boldsymbol{A}}\boldsymbol{T}_{\textcolor{Orange}{\boldsymbol{B}}} {}^{\textcolor{Orange}{\boldsymbol{B}}}{\textcolor{ForestGreen}{\boldsymbol{p}}} \]
donde: \[ {}^\textcolor{Blue}{\boldsymbol{A}}\boldsymbol{T}_{\textcolor{Orange}{\boldsymbol{B}}} = \boldsymbol{R}(\textcolor{Plum}{\theta}) = \begin{bmatrix} \cos{\textcolor{Plum}{\theta}} & -\sin{\textcolor{Plum}{\theta}} \\ \sin{\textcolor{Plum}{\theta}} & \cos{\textcolor{Plum}{\theta}}\end{bmatrix} \]
Matriz ortogonal y ortonormal: \[\boldsymbol{R}(\theta)^{-1} = \boldsymbol{R}(\theta)^{T}\] \[\det{\boldsymbol{R}(\theta)} = 1\]
Traslación 2D
Dado un marco de referencia \(\textcolor{Orange}{\{\boldsymbol{B}\}}\) paralelo a un marco de referencia \(\textcolor{Blue}{\{\boldsymbol{A}\}}\) trasladado \(\textcolor{ForestGreen}{{}^\boldsymbol{A}{\boldsymbol{t}}_\boldsymbol{B}}\). Encontrar la matriz de transformación que convierte las coordenadas del marco \(\textcolor{Orange}{\boldsymbol{B}}\) al \(\textcolor{Blue}{\boldsymbol{A}}\).
\[ \textcolor{Blue}{{}^A{\boldsymbol{p}}} = \textcolor{ForestGreen}{{}^A\boldsymbol{t}_B} + \textcolor{Orange}{{}^B{\boldsymbol{p}}} \]
Puede representarse como una transformación lineal? \[ f(\boldsymbol{p}) = \boldsymbol{T} \, \boldsymbol{p} \]
No para un dimensión de \(n=2\)

Traslación y rotación
(traslación) \(\to {}^\textcolor{Blue}{\boldsymbol{A}}{\boldsymbol{p}} = {}^\textcolor{Blue}{\boldsymbol{A}}\boldsymbol{t}_{\textcolor{ForestGreen}{\boldsymbol{C}}} + {}^\textcolor{ForestGreen}{\boldsymbol{C}}{\boldsymbol{p}}\)
(rotación) \(\to {}^\textcolor{ForestGreen}{\boldsymbol{C}}{\boldsymbol{p}} = {}^\textcolor{ForestGreen}{\boldsymbol{C}}\boldsymbol{R}_\textcolor{Orange}{\boldsymbol{B}} {}^\textcolor{Orange}{\boldsymbol{B}}{\boldsymbol{p}}\)
reemplazando \[ {}^\textcolor{Blue}{\boldsymbol{A}}{\boldsymbol{p}} = {}^\textcolor{Blue}{\boldsymbol{A}}\boldsymbol{t}_{\textcolor{ForestGreen}{\boldsymbol{C}}} + {}^\textcolor{ForestGreen}{\boldsymbol{C}}\boldsymbol{R}_\textcolor{Orange}{\boldsymbol{B}} {}^\textcolor{Orange}{\boldsymbol{B}}{\boldsymbol{p}} \]
dado que \(\textcolor{ForestGreen}{\boldsymbol{\{C\}}} \parallel \textcolor{Blue}{\boldsymbol{\{A\}}}\) y \(\textcolor{Orange}{\boldsymbol{B}} \equiv \textcolor{ForestGreen}{\boldsymbol{C}}\):
\[ {}^\textcolor{Blue}{\boldsymbol{A}}{\boldsymbol{p}} = {}^\textcolor{Blue}{\boldsymbol{A}}\boldsymbol{t}_{\textcolor{Orange}{\boldsymbol{B}}} + {}^\textcolor{Blue}{\boldsymbol{A}}\boldsymbol{R}_\textcolor{Orange}{\boldsymbol{B}} {}^\textcolor{Orange}{\boldsymbol{B}}{\boldsymbol{p}} \]

Transformación homogénea
\[ {}^A{\boldsymbol{\tilde{p}}} = \begin{pmatrix} {}^A\boldsymbol{R}_B & {}^A\boldsymbol{t}_B \\ \boldsymbol{0} & 1 \end{pmatrix} {}^B{\boldsymbol{\tilde{p}}} \]
\[ {}^A\boldsymbol{\tilde{p}} = {}^A\boldsymbol{T}_B {}^B \boldsymbol{\tilde{p}} \]
donde \[ {}^A\boldsymbol{T}_B = \begin{pmatrix} {}^A\boldsymbol{R}_B & {}^A\boldsymbol{t}_B \\ \boldsymbol{0} & 1 \end{pmatrix} \]
describe una pose relativa como una matriz \(3\times3\)

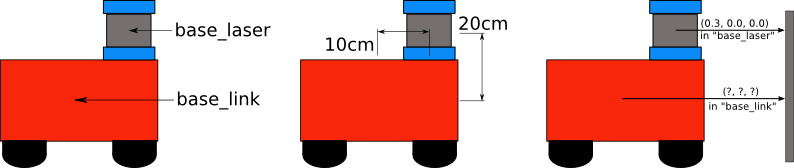
Volviendo al mundo real

Volviendo al mundo real

Pose 2D
- Tres componentes: \((x, y, \theta)\)
\[ {}^W \boldsymbol{\xi}_R \sim {}^W\boldsymbol{T}_R = \begin{pmatrix} \cos{\theta} & -\sin{\theta} & {}^W t_x \\ \sin{\theta} & \cos{\theta} & {}^W t_y \\ 0 & 0 & 1 \end{pmatrix} \]
\[ {}^W\boldsymbol{\tilde{p}}_d = {}^W\boldsymbol{\xi}_R {}^R\boldsymbol{\tilde{p}}_d \]

- Se puede considerar como un movimiento de traslación y rotación del marco de coordenadas
- La pose de un marco de coordenada es siempre respecto a otro.
Composición de poses
\[ {}^A\boldsymbol{\xi}_C = {}^A \boldsymbol{\xi}_B \otimes {}^B \boldsymbol{\xi}_C \]
Se puede cacular como: \[ {}^A \boldsymbol{\xi}_B \otimes {}^B \boldsymbol{\xi}_C = {}^A\boldsymbol{T}_B {}^B\boldsymbol{T}_C \]
\[ \boldsymbol{\xi}_1 \boldsymbol{\xi}_2 = \begin{pmatrix} \boldsymbol{R}_1 & \boldsymbol{t}_1 \\ \boldsymbol{0} & 1 \end{pmatrix} \begin{pmatrix} \boldsymbol{R}_2 & \boldsymbol{t}_2 \\ \boldsymbol{0} & 1 \end{pmatrix} \]
\[ \boldsymbol{\xi}_1 \boldsymbol{\xi}_2 = \begin{pmatrix} \boldsymbol{R}_1 \boldsymbol{R}_2 & \boldsymbol{t}_1 + \boldsymbol{R}_1 \boldsymbol{t}_2 \\ \boldsymbol{0} & 1 \end{pmatrix} \]

Representación de rotaciones
Problemas con las matrices:
- 9 elementos (3D)
- Difícil de interpolar
- Acumulan errores (pueden perder ortogonalidad)
- Gimbal lock

Librería de transformaciones
Por qué necesitamos una?
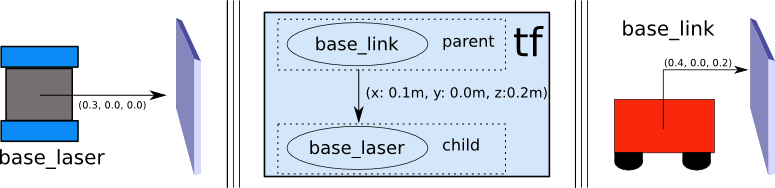
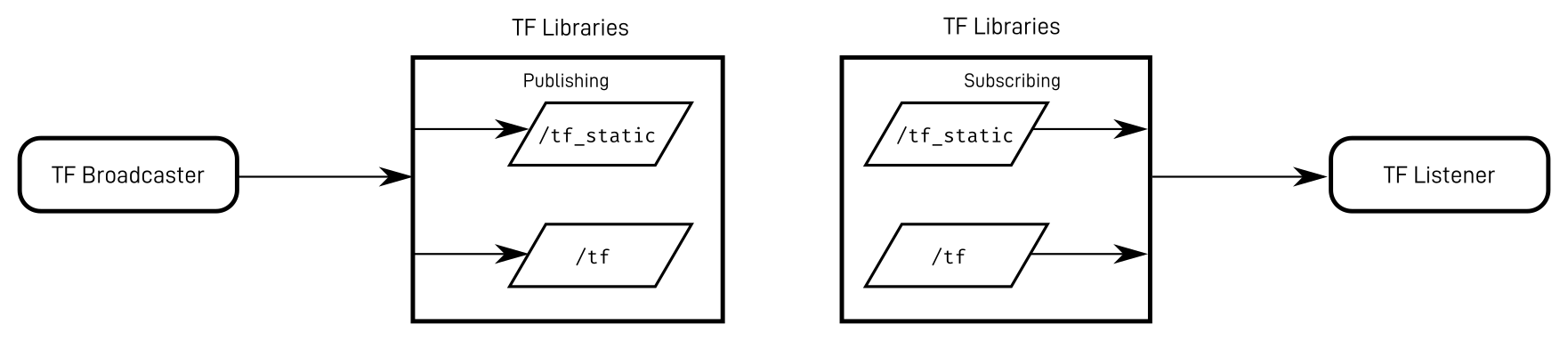
tf2: Librería de transformaciones
- Marco de coordenadas y sus transformaciones en el tiempo
- Estructura de árbol (no existen bucles)


tf2: Librería de transformaciones
- 2 Tipos de transformaciones: estáticas y dinámicas