Robótica
Clase 08
Semana 9 - 12/05/2025
URDF: 2 Elementos fundamentales
- Eslabones:
<link>
- Juntas:
<joint>
Link 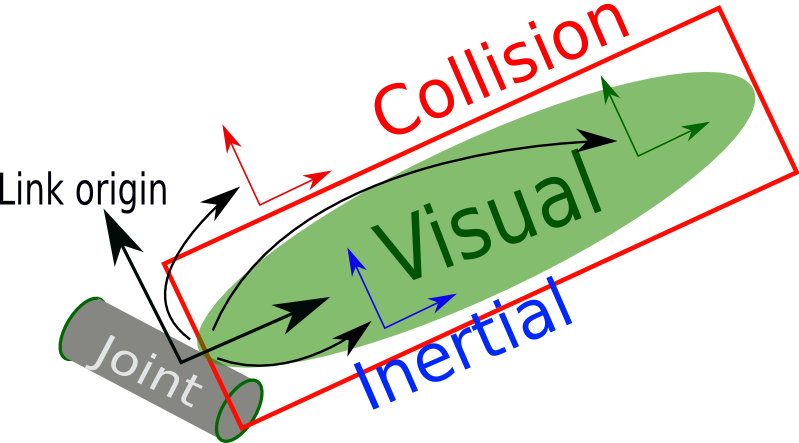
Joint 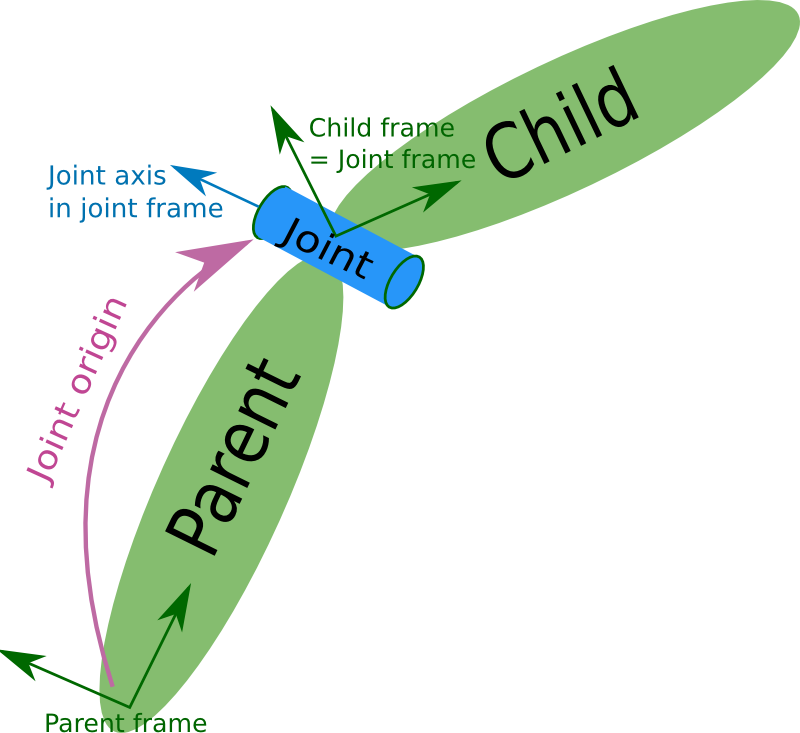
Etiqueta <link>..</link>
Geometría visual
<visual>..</visual>
- Origen:
<origin xyz="[pos_x] [pos_y] [pos_z]"
rpy="[roll] [pitch] [yaw]"/>- Material:
<material name="nombre_material">
<color rgba="[R] [G] [B] [Alpha]"/>
</material>- Geometría: prisma
<box size="[largo-x] [ancho-y] [alto-z]" />Ejemplo:
<visual>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<geometry>
<box size="0.1 0.2 0.3" />
</geometry>
<material name="Cyan">
<color rgba="0 1.0 1.0 1"/>
</material>
</visual>
Etiqueta <link>..</link>
Geometría visual
<visual>..</visual>
- Origen:
<origin xyz="[pos_x] [pos_y] [pos_z]"
rpy="[roll] [pitch] [yaw]"/>- Material:
<material name="nombre_material">
<color rgba="[R] [G] [B] [Alpha]"/>
</material>- Geometría: cilindro
<cylinder radius="[radio]" length="[ancho]" />Ejemplo:
<visual>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<geometry>
<cylinder radius="0.1" length="0.1" />
</geometry>
<material name="Silver">
<color rgba="0.79 0.82 0.93 1"/>
</material>
</visual>
Etiqueta <link>..</link>
Geometría visual
<visual>..</visual>
- Origen:
<origin xyz="[pos_x] [pos_y] [pos_z]"
rpy="[roll] [pitch] [yaw]"/>- Material:
<material name="nombre_material">
<color rgba="[R] [G] [B] [Alpha]"/>
</material>- Geometría: malla
<mesh filename="file://[nombre_del_archivo]" />Ejemplo:
<visual>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<geometry>
<mesh filename="file:///gear.stl" scale="0.01 0.01 0.01"/>
</geometry>
<material name="Orange">
<color rgba="1 0.3 0.1 1"/>
</material>
</visual>
Tipos de juntas
- Fija (
fixed)
1 elemento:
<origin .. />
<joint name="parteA_joint" type="fixed">
<parent link="padre_link"/>
<child link="parteA_link"/>
<origin xyz="[pos_x] [pos_y] [pos_z]"
rpy="[roll] [pitch] [yaw]"/>
</joint>
Tipos de juntas
- Fija (
fixed) - Continua (
continuous)
2 elementos:
<origin .. />
<axis ../>
<joint name="parteA_joint" type="revolute">
<parent link="padre_link"/>
<child link="parteA_link"/>
<origin xyz="[pos_x] [pos_y] [pos_z]"
rpy="[roll] [pitch] [yaw]"/>
<axis xyz="[x] [y] [z]"/>
</joint>
Tipos de juntas
- Fija (
fixed) - Continua (
continuous) - Revolución (
revolute)
3 elementos:
<origin .. />
<axis ../>y<limit ../>
<joint name="parteA_joint" type="revolute">
<parent link="padre_link"/>
<child link="parteA_link"/>
<origin xyz="[pos_x] [pos_y] [pos_z]"
rpy="[roll] [pitch] [yaw]"/>
<axis xyz="[x] [y] [z]"/>
<limit lower="[min_rad]" upper="[max_rad]"
velocity="[rad_por_seg]"
effort="[effort]" />
</joint>
XACRO: Macros en XML
Se necesita un paso de compilación:
$ xacro description.urdf.xacro

Actualizar dependencias: <exec_depend>xacro</exec_depend>
Paquete robot_state_publisher
- Descripción del robot ➡️
/robot_description - Juntas fijas (transformaciones estáticas) ➡️
/tf_static - Juntas móviles ➡️
/joint_states➡️ transformaciones dinámicas ➡️/tf

Topic /joint_states
- Listado de juntas con sus respectivos estados:
sensor_msgs/JointState
├── std_msgs/Header header
├── string[] name
├── float64[] position
├── float64[] velocity
└── float64[] effortQuién publica en el /joint_states?

Sistema completo

URDF + XACRO + robot_state_publisher + joint_state_publisher_gui